(一次元運動)
平均の速度
![]() で
で
![]() の極限をとる。
の極限をとる。
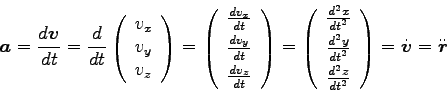
(三次元運動) ベクトルは、その各成分を微分する。 時間はスカラー量 (座標系の回転に対して不変) であるから、 速度はベクトルである。加速度も同様にベクトル。
加速度は、速度を更にもう一度時間微分する。
(逆演算) 積分
![]() を積分して
を積分して
(注意) 物理では、![]() からの微分と
からの微分と ![]() からの微分
が一致しないことはよくある。例えば、加速度が
からの微分
が一致しないことはよくある。例えば、加速度が ![]() の関数として不連続
な場合がそのような場合である。
の関数として不連続
な場合がそのような場合である。
(ベクトルの極座標表示) (2 次元)
座標変換
![]() で、
で、
![]() を質点に結び付いた座標系 (一般に重心系という) にとり、
質点をその座標原点におく。その様な座標系は一般には無数にあるが、
以下では、特別な場合として二つの場合を考察する。
を質点に結び付いた座標系 (一般に重心系という) にとり、
質点をその座標原点におく。その様な座標系は一般には無数にあるが、
以下では、特別な場合として二つの場合を考察する。
質点が新しい座標系の原点にあるから、質点の運動を論じることは
座標系間の相対運動を議論することに帰着する。第 3 講の座標変換の
公式により、並進変換については
![]() である。
今、
である。
今、
![]() であるから、質点の位置をもとの座標系
であるから、質点の位置をもとの座標系 ![]() で
極座標表示しておくと便利である。
で
極座標表示しておくと便利である。
![]() を動径方向の
単位ベクトルに選んで、それを
を動径方向の
単位ベクトルに選んで、それを
![]() と書くと、
と書くと、
![]() であるから、
であるから、
![]() と表される。位置ベクトルの
と表される。位置ベクトルの ![]() -
-![]() 成分
の極座標表示を用いると
成分
の極座標表示を用いると
速度と加速度は、Eq. (5) の
![]() を時間微分して得られるが、
その際、
を時間微分して得られるが、
その際、
![]() がもはや絶対静止座標系ではないことに注意する
必要がある。合成関数の微分法より
がもはや絶対静止座標系ではないことに注意する
必要がある。合成関数の微分法より
(内積の微分) 普通の積の微分公式が成り立つ。
また、単位ベクトルを微分すると、そのベクトルはもとのベクトルに直交する。 Eq. (7) は、そのような例である。
(3 次元極座標表示)
![]() 自習
自習
3 次元極座標についても、同様な取り扱いが可能である。
練習問題として、
![]() ,
,
![]() ,
,
![]() を
具体的に求め、それらを時間で微分することによって
速度、加速度の 3 次元極座標成分を求めよ。
(ヒント:
を
具体的に求め、それらを時間で微分することによって
速度、加速度の 3 次元極座標成分を求めよ。
(ヒント:
![]() であり、
この単位ベクトルは
であり、
この単位ベクトルは ![]() -
-![]() 平面の方向を向く。)
間違えない様にして根気良く計算を続けると、以下の結果が
得られる。
平面の方向を向く。)
間違えない様にして根気良く計算を続けると、以下の結果が
得られる。
(注意) Eq. (9) と Eq. (13) の速度成分は、簡単な幾何学的 考察によっても得られる。
(もう少し自然な座標)
もう少し自然な座標系として
![]() の
の
![]() を
軌跡の接線方向、
を
軌跡の接線方向、
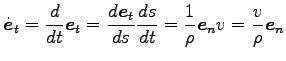
![]() を法線方向にとることができる。
そのためには、運動の軌跡に沿って起点
を法線方向にとることができる。
そのためには、運動の軌跡に沿って起点
![]() から
距離を測って、それを
から
距離を測って、それを ![]() とする。(これは、スカラー量である。)
ベクトル
とする。(これは、スカラー量である。)
ベクトル
![]() を
を ![]() の函数として表す。
の函数として表す。
接触平面の意味は、"運動が局所的には接触平面内でおこる"ことである。
これは次のようにしてわかる。まず、微少時間 ![]() の間におこる
位置ベクトルの変位は、Taylor 展開を使うと
の間におこる
位置ベクトルの変位は、Taylor 展開を使うと
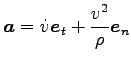
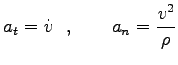
曲率半径の意味は、この座標系で加速度を計算してみると明らかになる。
すなわち、
![]() を
を ![]() で微分して、
で微分して、

![\begin{displaymath}\frac{d {\boldsymbol r}}{d t}=\frac{d}{dt}
\left(
\begin{arra...
...mm]
\frac{dz}{dt} \\
\end{array}\right)
=\dot{{\boldsymbol r}}\end{displaymath}](img9.png)






![\begin{displaymath}\frac{\Delta {\boldsymbol r}}{\Delta s}=\left(
\begin{array}{...
...ta s} [1mm]
\frac{\Delta z}{\Delta s} \\
\end{array}\right)\end{displaymath}](img86.png)



![$\displaystyle {\boldsymbol e}_t \cdot [{\boldsymbol e}_t \times {\boldsymbol e}...
...t \times {\boldsymbol e}_n] \frac{1}{2}(\Delta s)^2
+O\left((\Delta s)^3\right)$](img103.png)